C++
OpenGL
PC/Linux
(WIP) Constraint-based Physics Engine
(WIP) Constraint-based Physics Engine
(WIP) Constraint-based Physics Engine
(WIP) Constraint-based Physics Engine
(WIP) Constraint-based Physics Engine
(WIP) Constraint-based Physics Engine
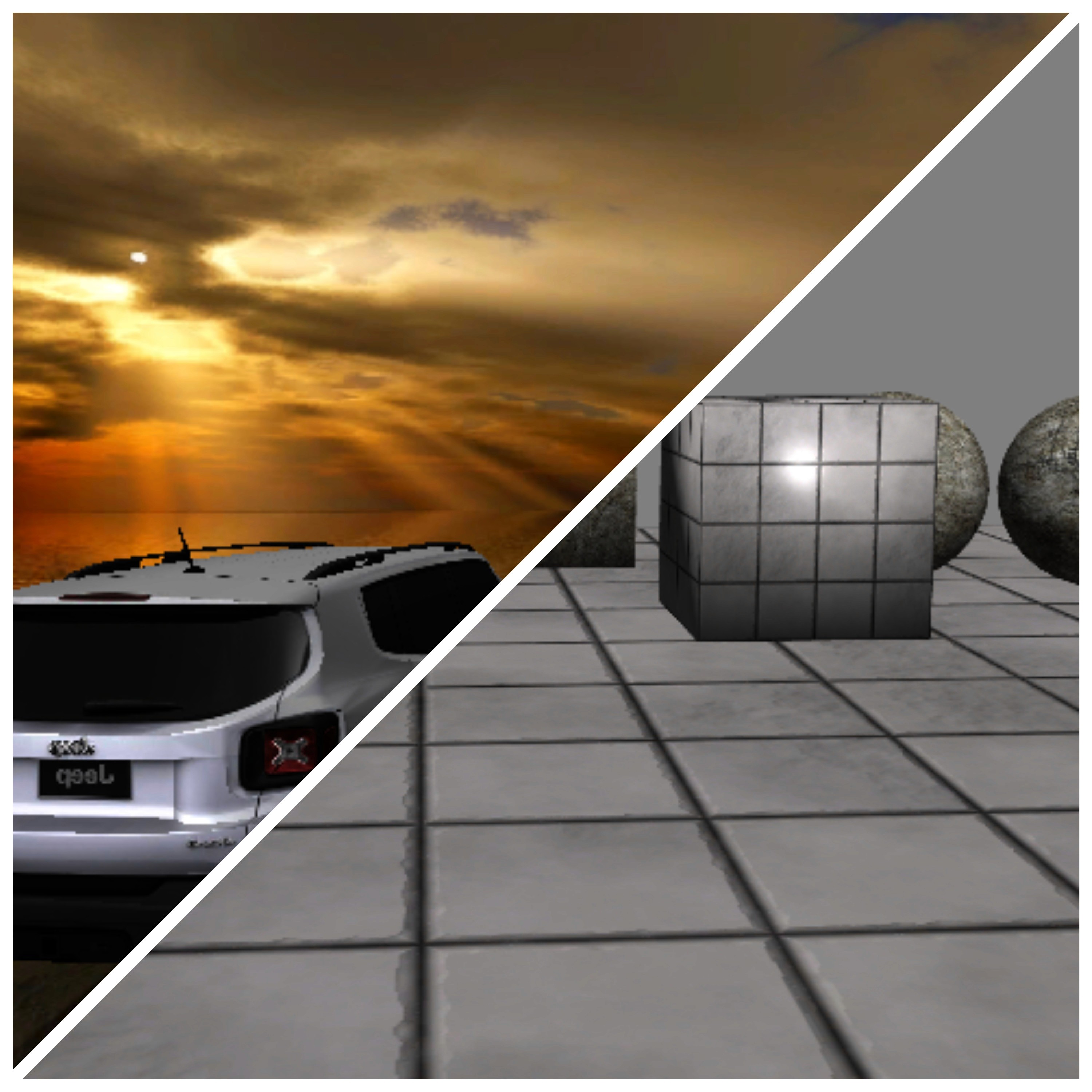
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.
I am currently working on creating a constraint-based physics engine for a 3D cross-platform game engine as a part of my final-year collaborative project.
The engine is planned to have all components of a constraint-based physics system such as:
Ability to work with both the Sequential Impulse(SI) and the Projected Gauss-Seidel(PGS) constraint solvers.
Rigidbody collision response including the use of contact manifolds and restitution.
Joint simulation - fixed joints, hinges, prismatic joints, and an all-purpose joint with the ability to limit the 6 degrees of freedom(DOFs).
Spring-Damper systems - including cloth simulation.